Köszönöm a gyors választ! Bemásolom ide a programot. Egy része működik, egyedül a számlálást nem sikerül beállítani. Bemásoltam , de itt a szerkesztő összevonta a program sorokat és szét kellett tördelni. A "buttonPin, buttonState.." stb. elnevezések egy utolsó példa programból lettek bele másolva, lényegét tekintve ugyan az amit elképzeltem, csak még nem neveztem át ezeket a meghatározásokat. Abban a példa programban működött, igaz hogy csak előre számolt. Egy nyomógombal van kombinálva, a működésében pedig minden negyedik gombnyomásra be kapcsol egy ledet.
A készülő programomban a motorvezérlő gombok működnek rendesen, ezek után írtam be az impulzus feldolgozó részeket. Tehát ha a motorvezérlést megnyomom, előre vagy hátra, akkor abban a sorban foglakozzon a beérkező impulzusokkal, hozzá adjon egyet vagy le vonjon egyet. De hát nem úgy működik, ahogy én, a csíkos hátu kismalac naívul elképzeltem...Egy két variánst kipróbáltam de mindíg a program futás sorait számolja, mert elég jól pörög, előre ill. vissza felé is.
Egyébként a működése ez lenne: Bekapcsolás, beírja a 200-as értéket (ez lehet később az egyik műhold pozícioja is), de ha resetelek akkor el indítja a motort alaphelyzetre, ott végálláskapcsoló RESET-et végez a számlálóban és elindítja a motort az ellenkező irányba, és a megadott pozicion megáll. A jobbra/balra gombokkal van vezérelve a forgatás. (marad még kettő szabad nyomógomb a fel/le , ezekre a későbbiekben pozicionált holdakra való rá léptetést képzeltem el, de ez majd később , ha belerázódok a programozásba)
Az arduinóban nincs direkt, bejövő felfutó/lefutó impulzus feldolgozás lehetősége?
#include<LiquidCrystal.h> //LCD pin to Arduino
constint pin_RS = 8;
constint pin_EN = 9;
constint pin_d4 = 4;
constint pin_d5 = 5;
constint pin_d6 = 6;
constint pin_d7 = 7;
constint pin_BL = 10;
constint buttonPin = 12; // A forgó jeladó érzékelő bemenet
int motjobb = 3; // Motor meghajtás jobbra kimenet
int motbal = 2; // Motor meghajtás balra kimenet
int refpont = 11; // Referencia pont vétel bemenet
int buttonPushCounter = 200;
int buttonState = 0; // a jeladó aktuális állapotát tárolja
int lastButtonState = 0; // a jeladó előző állapotát tárolja
A jeladó jelét vagy egyáltalán nem dolgozod fel, vagy hibás a vizsgálat logikája. Ha a hardveres réteg jó (nem prellez), akkor két út van a megoldásra. Az egyik a megszakítás (interrupt), a másik a mezei állapot-figyelés. Mindkettőnek ugyanaz az egyszerűsített elve, csak más hardveres eszközöket használ és kicsit eltérő módon kell kódolni. A lényege annyi, hogy vizsgálja, hogy van-e változás a bemeneten, amin a reed relé van. Ha van változás, akkor a megváltozott állapotot tekinti alapállapotnak és az ellentétes irányú változást fogja figyelni. végtelenül leegyszerűsítve:
bool input_state = false;
void loop() {
...
if (digitalRead(reed) == HIGH && input_state == false) {
input_state = true;
[plusz ide a számláló görgetése]
}
if (digitalRead(reed) == LOW && input_state == true) {
input_state = false;
[ide szintén a számláló léptetése, hogyha nagyobb felbontást szeretnél]
}
...
} // loop vége
Persze az igazán jó tanácshoz tudni kellene, hogy most épp hogy néz ki a kód.
Üdv Mindenkinek! Építek egy parabola antenna forgatót, és a vezérlését az Arduinóval gondoltam végeztetni. Az Unora vettem egy gombokal ellátott LCD-t, amit egy átalakított tesztprogrammal működtetek. A probléma az hogy a beleírt számláló állandóan a program futás közbeni lépéseket számolja és nem a beérkező jeleket a forgó jeladóról, (egyszerű, negyedelt tárcsa, indukciós jeladóval). Szóval itt meg vagyok akadva.
Tudna valaki segíteni tanáccsal, vagy ilyen jellegű példa programmal?
Mondok egy hétköznapi példát: képbe akarsz kerülni az éttermi gasztronómiával (mert mondjuk ihletet kaptál Ákostól). Pár hét olvasgatás és youtube nézés után pedig eljutsz oda, hogy a Rational kombi sütője nem jó, mert nem mindig csusszan ki belőle ellenállás nélkül a GN 1/1 sütőlemez.
Ekkor mondja Gordon Ramsay, hogy "Figyelj, alaposan figyelj!"
Elképesztően rossz irányból közelíted meg a témát. Amikor mi feltesszük a kérdést, hogy mégis, mit szeretnél csinálni, akkor azt azért tesszük, mert az elmúlt x évet sokféle feladatát sokféle megközelítéssel próbáltuk, néha kudarccal, néha hosszas kínlódással megoldani. Egyenként is, de kollektíve aztán pláne van mögöttünk annyi tudás, hogy ha az oroszlán barlangjába készülsz bemenni, mert cicát akarsz símogatni, akkor szólunk, hogy nem biztos, hogy jó ötlet -- helyette menj inkább „arra”.
Az a feltevésed, hogy „ez inkább játékra jó”, eleve nem áll meg, az Arduino UNO-ban is használt Atmel ATMEGA 328p IC péládul nagy valószínűséggel nagy számban fordul elő bármely 300 méter sugarú, városon belüli körben, annyira elterjedt (kávégép, porszívó, időjárásjelző állomás, stb.).
Nézzük tételesen.
> Ugye, az egésznek a lényege a "breadboard", amire mindent szerelni kell, illetve "próbapanel" jellegű, elég lesz a végleges verziónak NYÁK-ot készíteni.
Egyáltalán nem. Mondjuk nem a te hibád, mert sokan profik is keverik a témát. Vannak a fejlesztőeszközök, amelyek, ahogy korábban írtam, mindent tartalmaznak, ami a gyors és hatékony próbálkozáshoz kell. Műszaki megközelítésben az Arduino keretrendszer paneljai (Uno, Nano, Mega, stb.) is fejlesztői panelek, olyan szolgáltatásokkal és lehetőségekkel, mint a profi fejlesztői panelek. A kettő közötti különbségről elég sokat lehetne írni, ezt most kihagyom inkább.
A breadboard, ahogy írtad, a fejlesztés egy fázisában a gyors tesztelés eszköze, de igazából profik is maximum ad-hoc jelleggel és tényleg csak a legalapabb gyors tesztekhez használják, utána egyből mennek tovább más megoldásokra. Breadbordból egy féle van, a differenciát csak a méretek adják. Mindegyikbe ugyanaz a fix méretű (jumper) kábel kell, mindegyik 100 raszteres (2,54 mm-enként vannak a lyukai, hogy a hagyományos furatszerelt alkatrészek túlnyomó többségéhez jók legyenek). Az, hogy az egyikbe alig megy bele, a másikból meg egy tüsszentésre kiesik a kábel, az nem a technológia hibája (elsősorban), hanem a hitvány gyártási minőségé.
Mire való: egyszerű kapcsolásokat gyorsan, módosíthatóan, viszonylag megbízhatóan összerakni, elsősorban tesztelésre. Hátránya, hogy elektromosan nagyon szar tulajdonságai vannak, előnye, hogy baromi gyors és nem kell hozzá forrasztani.
> Vagy egy teljesen laikus kérdés, pl. IC-khez milyen beültető foglalatokat és demes venni és hány lábúak kellenek?
Pont akkorát, amekkora az IC-hez kell. De ez megint gombhoz a kabátot kérdés, mert beültető foglalat akkor kell, amikor a) kímélni akarod az IC-t beforrasztásnál, b) cserélni akarod az IC-t alkalmanként, c) drága az IC, ezért a következő projektverzióhoz is azt akarod használni, így egyszerűbb kihúzni a foglalatból, mint kiforrasztani. Ez persze a furatszerelt (DIP) IC-kre vonatkozik, a felületszerelt egy egészen más tészta.
Amit te breadbordnak hívsz itt, az hivatalosan breakout board. A kettő között az a különbség, hogy a breakout boardra rá van forrasztva egy alkatrész (IC, szenzor, gomb, led, stb.), és vannak lábai, amik...
...pont illeszkednek a breadboardba, vagyis próbapanelbe. Ha egy olyan IC-vel akarsz tesztelni, ami nem furatszerelt (DIP), így nem lehet közvetlenül a próbapanelbe nyomni, akkor kell a breakout board. Mondjuk abból nem mindegy, melyik, de ez ezen a szinten rohadtul mindegy. Teljesen felesleges ilyet venned.
Szóval.
Az Arduino egy keretrendszer, amely (1) egy kvázi-szabványos fejlesztőeszköz-sorozatból (ezek a panelek), vagyis hardverből, (2) a hozzá illeszkedő szoftveres fejlesztői környezetből (IDE) és (3) a velük szállított rengeteg működő kódból (minták és könyvtárak), valamint (4) a közösségből áll.
Az Ardiono fejlesztői paneleken lévő mikrokontrollerek (MCU)-k gyártóinak is mind vannak ilyen fejlesztői környezetei (hardver és szoftver is), de kezdőknek bőven elég az, amit az Arduino keretrendszer tud, pláne, ha nem akarnak később fejlesztésből élni [mert akkor, legalábbis szerintem, az egészet jó messzire el kell kerülni]. Minden MCU (és szoftveres fejlesztői környezet) velejárója, hogy többé-kevésbé bármit meg lehet velük valósítani, amelyet a „beágyazott fejlesztés” ernyője alá valahogy be lehet szuszakolni. Ez kb. az Ipar 3.0-tól felfelé minden.
A beágyazott fejlesztés azt jelenti, hogy az (általában elektronikus vagy elektro-mechanikus) eszköz szabályozását-vezérlését-kezelését egy olyan egyszerűsített cél számítógép végzi, amelyben egyedi szoftver fut az adott feladatra optimalizálva (ez a firmware). A központi mikrokontroller pedig szenzorokon, aktuátorokon (pl. motor), és optikai eszközökön (kamera, kijelző, stb.) keresztül gyűjt adatokat, illetve a gyűjtött adatok alapján végez beavatkozásokat. Ebből következik, hogy kis (de tényleg csak kis) túlzással bármelyik mikrokontrollerre bármelyik érzékelőt, kijelzőt, aktuátort rá lehet rakni és kezelni is lehet vele, a kérdés csak az, hogy az illesztés hogyan lesz megvalósítva. Ez meg elektronikai kérdés, amivel azért a fejlesztés során érdemes az alapoknál kicsit messzebbre menően tisztában lenni.
És végül. A külvilággal történő kapcsolattartás történhet analóg és digitális domainen. A digitálison belül lehetnek még protokollok is, létezhetnek különböző rétegek (hardver, protokoll, applikációs), ezekhez tartozó szabványok (pl. i2c, i2s, spi, 1wire, párhuzamos), de (más szinten) ilyen a korábban már említett wifi, lora, stb. No, ez az, ami végtelen számú kombinációk kialakítását teszik lehetővé, épp emiatt van az, hogy nincsenek tételesen felsorolva a lehetőségek. Csak i2c kijelzőből van kb. 100 féle. Az, hogy neked melyik jó, az a feladattól függ.
Igazából minden a feladattól függ. Lehet kapni szenzor-készleteket, egészen nagyokat is (20-30 különböző ki-bemeneti elemmel). Ezeknél a hardveres illesztés és a gyors csatlakoztathatóság meg van oldva, tehát csak a kóddal kell foglalkozni, az viszont rendszerint már valamilyen szinten késze van. Ha meg az van, hogy több kell, mint amit a 328p ígér, akkor jön a Mega2560, vagy ha az is kevés valamilyen megközelítésben, akkor pár szintillesztő, és jöhet a DUE, amiben egy elég bika ARM Cortex M3 magos MCU van. Ha kell wifi, akkor arra is van már gyári megoldás. Lora-ra is, ha jól láttam. De ez mind olyan, hogy ha nem tudod, hogy mit akarsz csinálni, akkor mindegy, hogy melyikhez nyúlsz, jó eséllyel kudarc lesz a vége.
Arduino weboldalán kellene legalább egy minimális lista, hogyan 'csoportosítják" a dolgaikat, melyek a fő csapásirányok, és milyen kiegészítők ajánlottak/jók hozzájuk (ha már egyszer hamisítják is.)
Szóval az első kérdés, hogy mit akarsz csinálni. Utána jön az, hogy mivel és hogyan.
Először képben akarok lenni, hogy melyik "csoport" mire jó. Ha jól sejtem, az alap verziók játékokhoz hasonló célokból készültek, legyen egy motor és lehessen mozgatni vízszintesen, azaz előre és hátra, korlátozottan, vagy finomabban kormányozni bizonyos mértékben, de csak adott szögbe beállítva előre-hátra mozgáshoz.
Majd ugyanennek a csoportnak volt egy fejlesztése, megjelentek szenzorok - csak éppen sehol sincs egy lista, hogy milyen típusú és funkciójú szenzorok vannak jelenleg. A motoros vezérléshez kellett távolság érzékelés, mert csak így lehetett az akadályokat kezelni, de mi van még? Hőmérséklet, és egyebek mérése? Hang, fény, infravörös vagy elektromágneses sugárzás érzékelés pl.?
Azután van a "webes" sorozat, amit sokan csak ESP32 IC-vel azonosítanak, mintha csak ez az egy lenne és erre épülne minden.
Mi van a többivel?
Vagy, egészen alap téma:
Ugye, az egésznek a lényege a "breadboard", amire mindent szerelni kell, illetve "próbapanel" jellegű, elég lesz a végleges verziónak NYÁK-ot készíteni.
Majd kiderült, hogy többféle "breadboard van.
Ezekből melyik kell és milyen kábelek kellenek hozzá?
Sok panaszt olvastam, hogy rendeltek kábelcsomagokat, de vagy lötyögtek a lukakban, így nem volt érintkezés, vagy be se lehetett dugni.
Vagy a kábelek jók lehettek, csak a különböző breadboard-ak lukjai nem azonos méretűek?
Vagy egy teljesen laikus kérdés, pl. IC-khez milyen beültető foglalatokat ésdemes venni és hány lábúak kellenek?
Laikusan úgy gondoltam, hogy elég a leghosszabbat megvenni, legfeljebb a lábak egy részét nem használjuk a próbapanelen, de láttam külön IC-nek való breadboard-ot, ahol nem párhuzamosan, hanem legyező szerűen voltak az IC adott lábaihoz a lukak kiképezve.
Mind az 5 motoros funkció működik ,végállások rendben vannak, sebességek állíthatóak bár még egy dupla Morse érintkezős relét ki kell cserélnem , egyik nyugalmi érintkezője nem zár.
Feladat :
- ha lefelé akkor pwm motorjel
- ha felfelé akkor pwm motorjel + irányváltójel
Motor helyén egy lámpa volt és felfelé égett , lefelé nem .
Minden hiba egyszerű , csak meg kell találni -- főnököm idéztem .
Itt vagyunk a hiba torkában -- kollégám idéztem -- már csak két napot egerészünk.
Még relét kell szereznem , vagy arduinos relével csinálom , eddig csak kipróbáltam úgy hogy kézzel érintettem össze a két drótot. Feleségemre nem merem bízni mert ha relé is húz és zárom a nyugalmi érintkezőt akkor a CMOS kinyúlik.
Van is 12 voltos DC relém , de nem stimmel a lábak távolsága.
Még lcd.-vel kapcsolatban lehetséges , hogy egyet kérdezek de előbb szeretnék magam rájönni.
rfc ! Ez a fogó jónak tűnik és nagyon sok szemet adnak hozzá , így jó az ára .
Csak, ahogy halaloszto is írja, jobb venni egy újat. Mármint, gyorsabb, olcsóbb, sokkal nagyobb eséllyel fog úgy működni, mint a régi.
Hogy "profi" válasz is legyen. Két út van. Az egyik rohadt rázós, a másik csak kicsit. A rázós az, hogy semmi nincs, akkor ez egy elég lassan haladós próba-szerencse történet lesz, és akkor esélyes, ha sem működő távirányító, sem megbízható dokumentáció nincs (ugye az első nincs, a második meg szinte biztosan nincs). Az eredmény, már ha lesz egyáltalán működő eredmény, egy elég komoly, versenyzésre is alkalmas rádiótávirányítású autó árával fog vetekedni. Ez mondjuk hat számjegy, és nem 1-gyel vagy 2-vel kezdődik. A másik, kevésbé rögös út, hogy van működő távirányító és/vagy van megbízható dokumentáció. Akkor kvázi pikk-pakk megvan, és a hat számjegy lehet, hogy eggyessel vagy kettessel kezdődik. Modell és Hobby, Klapka utca. Beviszed a masinát, megmutatod, javasolnak valamit. Ez pár buszjegy vagy némi autózás. A megoldás pedig biztosan nem hat számjegy lesz.
Kb azt kérdezted, hogy valaki tudna-e a kávédarálodhoz bekapcsológombot készíteni.
Egyrészt mutatnál képet az autóról, annak a vezérlőjéről, lehetne valamit agyalni. Másrészt 110% hogy egyszerűbb és olcsóbb szerezni egy hasonló autót használtan vezérlővel, és annak a vezérlője vagy viszi, vagy hozzáigazítható. Pl a Nikko autók egyszerű vezerlői kb kétfélék és kész.
Szia, Igen, a D0-D1 mizériát sokan benézik. Én asszem egyetlen egy alkalommal voltam kénytelen arra tervezni. De ez minden fejlesztői környezetben, illetve eszköznél alap, hogy a programozó lábakat lehetőleg hagyjuk békében maguknak. Egy kivétel van, ha kifejezetten nem szempont a későbbi firmware csere. De az meg már réges régen nem az Arduino terepe.
Én akkor vettem présszerszámot, amikor kb. 800 csatlakozót kellett volna krimpelnem. Akkor azt mondtam, kerül, amibe kerül, sokszorosan visszahozza az árát időben. A következő döntésem az volt, hogy SOHA többet próbapaneles prototípus, ha kell valami, inkább kidobok 9 nyákot, de legyártatom kínában, mert olcsóbb és gyorsabb tervezni és gyártatni, mint forrasztani (itt shift registerek sokasága volt, konkrétan 4 oszlopban és 10 vagy 12 sorban, 300 körüli leddel és előtétellenállással -- közel 4 hétig készült. Összehasonlítva KiCad-ben ez most kb. 6 óra munka, plusz a gyártás, amit meg kell várni).
Annó,volt egy Texas végerősírő kapcsolás,amiből több tucatot raktam össze (ugyan azzal a filmmel készített panelre!).Mind elsőre indult.Kivéve egyet.Azzal bármit csináltam,gerjedt.Szívtam sacc egy hétig,de nem jutottam vele dűlőre.Végül ugyan azzal a filmmel készített másik panelra átpakoltam minden alkatrészt. Első bekapcsolásra indult! Ki érti ezt? (stilszerűen! :-) )
Mivel érdeklődött korábban valaki, gondoltam helyzetjelentek a nixie órámmal, illetve a villódzó LED-ekkel kapcsolatban.
1. Átterveztem a NYÁK-ot, és ahogy Prof javasolta, áttértem a teliföldes megoldásra.
Nem is értem, miért nem jutott eszembe, hiszen eleve egyszerűsíti a dolgot az, hogy nem kell a GND-t mindenhova elmadzagolnom...
Talán azért, mert a kínai gyártatás előtt vasaltam a NYÁK-jaimat és azzal nehéz szép teliföldet csinálni, nem tudom.
Minden ostobaságot azért nem sikerült megszüntetnem, mert a rádugós panelt nem akartam újra rajzolni, bár arra is sort kell kerítenem, mert tele van a hócipőm a 74141-ekkel.
Eladott nekem valaki 32 db-ot, amiből 20 db ab start rossz volt és már azóta is cserélnem kellett kettőt... Oké, 40 éves holmi ez is, de azért már na...!
Lehet, hogy az egész BCD dolgot elfelejtem és mivel már amúgy is kell portbővítőt használnom, meghajtom arról direktben a katódokat optó + tranzisztor/FET segítségével, majd még megálmodom.
2. A LED-eknek csináltam saját, dedikált 5V-os tápot.
3. A LED-ek vezérlését teljesen levettem a NYÁK-ról és parasztosan átkötésekkel csináltam meg.
Hogy melyik beavatkozásnak köszönhető, nem tudom, de öröm és boldogság, így nem villognak a LED-ek!
Mindenre megválaszoltál,már régen is gondolkoztam , hogy lehet az , hogy D0-D1 kimeneten kommunikál miközben ott még lehet külső terhelés. Aztán erről meg is feledkeztem és őrületbe kergetett , hogy hol tudtam , hol nem tölteni a programot. Most ezt megbeszéltük. Most feltöltéskor lehúzom a csatlakozót.
A linket amit küldtél megnéztem ,majd ki is próbálom .
Elég lassan haladok, az asztalon minden funkciót lepróbáltam, de ott nem volt zavar, de élesben nagyon kell vigyáznom nehogy túlmenjen a végállásoknál.
Csinált olyant , hogy az váltóáramú motor egyszerre akart fel és le irányba menni szerencsére ez a motornak meg sem kottyant . Pedig leddel próbálva nem volt gond.
Legnagyobb baj , hogy alig látom és már 71 éves vagyok és a sok térdelés sem úgy megy , de szeretem csinálni. Nyáron jó időben az udvaron egy vasasztalon szoktam szerelni, de ez a dög alig fér ki az ajtón és csak a szomszéddal tudjuk cipelni.
A múltkori és kapcsolás segített, most telerakom többszöri keresztreteszeléssel és késleltetésekkel , hogy zavarállóbb legyen.
Te biztosan ismered az NDR-NSR préselhető csatlakozókat , vettem egy készletet, de krimpelő fogót nem vettem , mert bitang drága . Forrasztottam és kombinált fogóval nyomkodtam ez elég lassan haladtam.
A 2560.-ast én Mega.-nak ismertem , bár még nem volt vele dolgom , lehet avval kellet volna kezdenem.
Én most egy időre elvonulok , ha elakadok újra jelentkezem.
Írod a grafikus kijelzőt, ezt már nem fogom megtanulni , maradok a 16x2 és a 20x4 lcd kijelzőknél.
Az, hogy valahonnan van +12V, nem jelenti azt, hogy az "munka" 12V. Javaslom nem a csökkentést, hanem azt, hogy ha egyékbént terhelhető, akkor egy 12V--5V normálisan szűrt kapcsolóüzemő step-down konverterrel oldd meg a tápolást. Az Arduinon lévő táp IC nem túl erős.
Igen, az RX és TX lábakat kód feltöltésnél illik lebegőn hagyni.
Igen, össze lehet, de vagy rx-tx lábakkal (ami ugye a feltöltésbe bele fog szólni), vagy kell generálni egy "kamu" soros vonalat (Software Serial). Utóbbi működik, de zabálja a memóriát és az Arduino keretrendszer által generált alap kód maitt egyébként is szar időzítés miatt nem túl megbízható. De működhet. Példa: https://www.electroniclinic.com/serial-communication-between-two-arduino-boards/ A kártyáknak nincs fizikai címük (soros kommunikációnál legalábbis nincs).
Én helyette egy 2560-at javaslok. Felhasználás tekintetében SEMMI különbség nincs a kettő között. Jóval nagyobb memória, sokkal több ki- és bemenet. Ad abszurdum, az el fog vinni a két soros kijelző helyett egy grafikust is. Szettben is lehetett kapni fillérekért. A színes grafikus kijelzővel nem, de a Megával SOKKAL egyszerűbb dolgod lesz.
- masszírozómotor fel - le 230VAC TRIAC vezérlés olyan mint egy mosógépmotor végállásokkal , ennek HALL szenzoros végállásai vannak.
Asztalon próbálva minden működött , de beépítve meghülyült ,erre számítottam.
az asztalon csak ledek voltak a kimenetek , azok nem okoztak problémát.
A bemenetekre azA0…. A5 használom, nem árnyékolt a vezeték ezért tettem minden bemenetre 100nF és 1Mohm szűrést. Ez hatékony lett 300-400 digites ugrálás lecsökkent +/- 2-3.-ra.
Egyelőre 2 db Arduino UNO R3 használok , de a 8db levegőszelepet és a kompresszort még nem próbáltam.
A régi vezérlőn van +5 , +12 és +15 volt, a +12.-öt csökkentem 10.-re és a dugós tápnál csatlakoztatom , szerintem ezzel nem lesz problémám .
Most jön a két konkrét kérdésem:
- Mivel a digitális ki és bemenetekkel spórolnom kell ,azt vettem észre ,hogy feltöltéskor le kell húznom a D0 és D1 vezetékeket . Ha nem húzom le , akkor nem fejezi be a feltöltést. Már 3-szor cseréltem , azt hittem tönkre ment. Ugye ez normális ? Ott van a TR és TX.
- 2 Arduinot össze lehet kötni úgy , hogy változót vagy fix szöveget átvihetek egy másik Arduinora .
Erre írna nekem valaki egy rövid példát? Akkor ezt a D0 és D1 kimenetet már nem használhatom másra ?
void loop() { valtozo = valtozo + 1 ; Serial.print (" főpróba "); // ezt a két sort vigyétek át a másik arduinora Serial.println ( valtozo) ; // ezt a két sort vigyétek át a másik arduinora delay (2000) ; }
-.-.--.--.-.--.-
Úgy tudom ezeknek van fizikai címe , hogy tudja melyik Arduino a címzett . Na ezt , hogy tudom meg ?
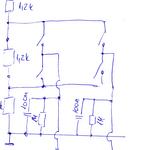
Ez csak nagyjából rajzoltam, még vannak rajt sallangok
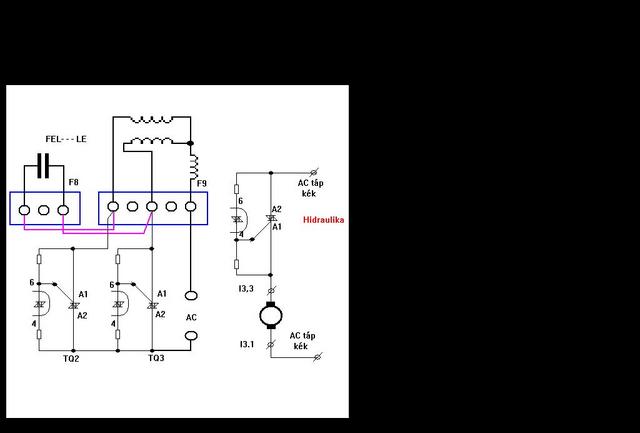
Ez a támla fel-le mozgatása , a hidraulika valójában kompresszor csak nekem ezt mondta az eladó.
Az elektronikáról nincs kérdés , nem akarlak megsétáltatni benneteket csak a két kérdés a lényeg.
16x2 lcd kijelzőt használok és csak az egyik gépre akarom tenni.
A szelepek miatt lehet , hogy harmadik Arduino UNO is be kell vetnem .
Tudom létezik a MEGA , de nekem van vagy 8 UNO.-m és ezt valamennyire ismerem.
Tök jól le van írva a gyártói adatlapokban, hogy melyik mikrokontroller mire képes. A legtöbb gyártó még gyakorlati alkalmazási példákat is mellékel.
Ezek univerzális számítógépek. Szinte bármit meg tudsz valósítani bármelyikkel. Kérdés, hogy melyikkel milyen úton. Az egyikkel a fejlesztés lesz gyorsabb, a másikkal a végtermék olcsóbb, a harmadik megoldás pedig kevesebb helyet foglal a NYÁKon, a negyedikhez kevesebb külső komponens kell, az ötödik gyorsabban hajtja végre, a hatodik alig fogyaaszt, stb. Neked kell döntened, mert ezek közül csak párat tudsz egyszerre megvalósítani.
A mikorokontroller választás pedig úgy néz ki, hogy értesz ehhez a szakmához, ismersz néhány terméket, ismered a kapott feladatot. És ehhez a feladathoz választasz eszközt. Kezdőként egy munkahelyen valószínűleg azzal kell dolgoznod, amit egy senior választott. Gyűjtöd a tapasztalatokat, és pár év múlva már lesz elég rálátásod.
Kezdő hobbistaként, akinek nem ez a munkája, mit tehetsz?
Leírod itt a fórumban, hogy mennyire értesz hozzá most, és mit szeretnél megvalósítani. Akkor tudunk segíteni választani.
Ha nincs semmi konkrét célod, csak szeretnéd megtanulni az alapokat, akkor is tudunk javasolni.
Szóval az első kérdés, hogy mit akarsz csinálni. Utána jön az, hogy mivel és hogyan.
Másrészt olyan 1:1 megfeleltethetőség, hogy ez "pontosan" erre, az meg "abszolúte arra" való, nem lehet, mert igazából mindegyikkel meg lehet csinálni (szinte) mindent, csak nem biztos, hogy annyira egyszerű. Nyilván végtelenülle van egyszerűsítve a kijelentés.
De. Alapvetően ahhoz, hogy megértsd, hogy mi miben és mitől más, kell egy alap szintű szakmai hozzáértés. Ezt pl. a Kristálytiszta Elektronika oktatási anyagaiból (az első még Arduinora épült) össze lehet szedni 3-4 hétvége alatt, gyakorlati megközelítésben. Egy X8-hoz azért már nem árt, ha van komoly programozói, programtervezői, rendszerüzemeltetői, beágyazott hardveres tapasztalatod. Nem feltétlen mérnöki diploma, de nulláról rövid úton kudarc (és rengeteg feleslegesen elhardált idő és pénz) a kísérletezés. A beágyazott fejlesztésben az egyik legfontosabb ökölszabály, hogy a projekthez választunk hardvert, nem projektet a hardverhez. Röviden: -- processzor órajel: a feldolgozás sebességét adja meg, minél gyorsabb, annál flottabb a működése számításigényes feladatoknál, -- memória: a betölthető kód méretét dereminálja, minél nagyobb, annál jobb, de itt inkább kilobájtos méretű kódokról beszélünk (amit ma írtam, 132 kbyte, de ez gyakorlatilag csak egy egeret emulál, egy másik, gépet vezérlő az valamivel fél mega alatt van, 4xx kbájt körül áll most, de ezen kijelző, komoly analóg feldolgozó van), -- portok: a kívülről jövő és a kifelé menő mindenféle jelek számosságát korlátozzák. Egy "sima" kijelző 5 port, egy SPI-s 4 (vagy 3 vagy 5), i2c-n meghajtott 2 port. Egy gomb 1 port, de egy 4x4-es billentyűzet már 8. -- egyebek, erre kevés példát hozok: milyen kommunikációs protokollokat ismer alapból az eszköz (SPI, i2c, UART, CAN, i2s stb.), vagy például a már kivezetett Leonardo tudott egérként vagy billentyűzetként funkcionálni (ún. USB-HID eszközként), vannak olyanok, amin van wifi, vagy bluetooth, vagy GSM, vagy LoRa, vagy ezek tetszőleges kombinációja, -- forma: a "lábasok" próbapanelbe dugva muzsikálnak jól (pl. Nano), a dugaszolhatók meg önállóan, inkább shieldekkel (rádugható kiegészítő panelekkel). Előbbi megoldás nagyobb szabadságot ad, de a kevés kivezetés gondot okozhat. Én egyetlen kivétellel mindent Nanora terveztem, ami a kivétel volt, az MEGA2560 volt, mert a kód is baromi nagy volt és a lábak jelentős része is használatban volt benne. -- 8 vagy 32 bit -- ez nehéz kérdés, alapból 8 biten azért komoly és pontos számítást, megbízható analóg feldolgozást (kellő pontossággal) nagyon nehéz, illetve sokszor lehetetlen megcsinálni (illetve lehet 8 biten is 32 bites mélységben számolni, de nagyon csúnyán lefekteti a kis órajelű IC-t, mert amit a 32 bites megcsinál direkt regiszterből 2-4 órajelcikus alatt, annak itt több tucat órajelcikus kell, mert előbb 8 bitessé kell szétszedni a számokat, elvégezni velük a műveletet, majd visszakonvertálni 32 bitre. Ráadásul maga a kód, ami ezt megcsinálja, egy monstrum.
Nagyjából ennyi.
Ahogy azt már n+1 alkalommal felvetettük, a fő kérdés, hogy mi a célod? És még itt, pár alap irány.
-- ha ebből, már a fejlesztésből szeretnél megélni, akkor az Arduino keretrendszert mindenestül kerüld el, lehetőleg nagyon-NAGYON messzire,
-- ha szeretnél hobbi szinten foglalkozni vele, akkor a fent említett Kristálytiszta Elektronika kiváló, de a net dugig van jó forrásokkal, kész oktatási anyagokkal (kezdve a Vault 1337 YouTube csatornájával, de fent van most a Kristálytiszta Elektronika is, de ezen kívül is baromi sok van, ha olvasni jobban szeretsz, az O'Reilly úgy 10 éve kiadott, és azóta legalább egyszer már frissített egy brutál jó könyvet a témában, azt ajánlom ISBN: 9781491903520 ),
-- ha csak egyetlen projektet akarsz megcsinálni, akkor, ha nem akarsz vele egészen sokat szívni, inkább bízz meg valakit, hogy vagy segítsen benne, vagy keress egy Maker-csoportot, ahol ezzel foglalkoznak (pl. itt, ezen a fórumon), vagy legvégső esetben bízz meg valakit, aki megcsinálja az egészet (valószínűleg ez lesz a legolcsóbb megoldás, de sok függ attól, hogy mi az ötlet és mi a célod vele), -- ha csak ki akarod próbálni, akkor... Vedd meg a legolcsóbb kezdőkészletet (Nano, ledek, kijelző, buzzer, esetleg szervó, hőmérséklet szenzor, rgb led, joystick), és építs belőle 3-4 dolgot. Ez szerencsés esetben 10 000 forintból megúszható.
Köszönöm így utólag is, legalább kezdem érteni, hogy az arduinosok által hangoztatott nano, meg uno, meg mega, stb. egyáltalán nem egymásra épülő dolgok, mindegyik másra való.
Azért jó lenne, ha az arduino-sok legalább annyi fáradtságot vennének, hogy csinálnának egy embereknek szóló leírást, hogy melyik termékcsaládjuk (?) mire jó, mert nagy a katyvasz.
Tipikusan az a deja vu érzésem, mint amikor tudományos kutatókkal hozott össze a sors, akik lelkesen és órákon át voltak képesek beszélni szakzsargonban, hogy milyen problémákat hogyan küzdöttek le, csak éppen azt nem voltak képesek negyed órás körmondatokban se elmagyarázni, hogy miről van szó.
Ez a hozzászólás elkerülte a figyelmemet. A Portenta X8 egy fejlesztői kártya. Az a célja, hogy a fejlesztő mérnökök viszonylag gyorsan (mondjuk 2-3 nap alatt) össze tudjanak rittyenteni egy olyan prototípust, amellyel egy későbbi termék működőképességét meg tudják vizsgálni. Nem kell külön a hardverrel szórakozni (kb. készen van), nem kell külön a szoftver egyes részeivel foglalkozni, mert kb. készen van, csak össze kell ollózni. Ha a terv (PoC) igazolódik, akkor nekilátnak és akár (kicsit) más eszközökkel az egészet nulláról lefejlesztik, hardvert, szoftvert, mindent. Ennek megfelelően ezen a kártyán nagyjából minden rajta van, amire egy ilyen koncepció tervezésekor és előzetes tesztelésekor szükség van: megfelelő táp, programozó és debug felület, sok kombinációs lehetőséget kínáló mikrokontroller, sok kivezetés, brutál erős (épp ezért szar fogyasztású) eszközök, stb. Tehát "mindent bele", nincs semmilyen szempontból optimalizálva. És hogy milyen későbbi késztermékek előzetes tervezéséhez jó: komoly adatfeldolgozási igényű, támogató/felügyelő rendszerekhez, ipari környezetben elsősorban, "okos", részben önálló, akár mesterséges intelligenciát is bevevő vezérlő-szabályozó-beavatkozó rendszerek alapjaként, támogatásaként, felügyeleteként szolgáló alrendszerekhez. Gyakorlatilag nincs benne »„az átlagnak” szóló alapfunkció«.
Mennyivel jobb egy Liebherr LTM-1450-8.1-et megvenni, mint egy Opel Mokát? Mennyivel jobb egy ARRI Alexa 35-öt megvenni, mint egy Panasonic Lumix GH5-öt? Mennyivel jobb egy Patek Philippe Grandmaster Chime-ot megvenni, mint egy Casio G-Shock-ot? Ha az elsőkre rá kellett keresned, alighanem érted, mi a helyzet. Szakmai szempontból. Az Uni/ESP32, de a Portenta X8 is egy-egy fejlesztőeszköz/család/termék/ökoszisztéma, ahogy vesszük. Adott célra lettek kitalálva, ahol a célok sokszor eléggé összemosódnak, illetve az Arduino keretrendszer (a Pro-t is beleértve) viszonylatában meglehetősen szabadon értelmezettek. A legfontosabb kérdés a cél, amire használni szeretnéd. Van, amire az X8 nem lesz jó. Van, amire az Auno (plusz ESP) nem lesz jó. Mindegyiknek vannak előnyei, hátrányai egy-egy szempontrendszer szerint, másképp fogalmazva, a tudáscsomagjuk jelentősen eltér egymástól. Köznyelviesen fogalmazva: durvára más ligában játszanak. (Az már személyes véleményem, hogy a Portenta hardverének semmi keresnivalója az Arduino keretrendszerében, a Pro-t is beleértve). Ilyen esetekben az a szavam járása, hogy ha meg kell kérdezned, akkor neked elég lesz az UNO + ESP kombó is.Nem kizárt, hogy tévedek, de ha leírod, hogy pontosan mit szeretnél megvalósítani, akkor értelmesebb, célirányos, használható(bb) választ tudok adni.